
Innovative robot hands hold promise for assistive living, prosthetics
There’s nothing quite like the comforting squeeze of your partner’s hand. But a robot’s hand? That’s perhaps a bit different.
Now, an SFU mechatronics graduand has designed 3D-printed humanoid robot “fingers” that mimic the strength and tenderness of a human hand. For people with mobility challenges or limb differences, robots equipped with these flexible fingers could prove important companions or tools for independent living.
“In this field, called soft robotics, we take inspiration from nature to create materials for robots that can safely interact with humans,” says Manpreet Kaur, who developed the 3D-printed humanoid fingers as part of her recent PhD thesis, supervised by mechatronic systems engineering professor Woo Soo Kim. Kaur graduates this month, having successfully defended her thesis in April.
Today’s commercially available robots are often made with hard materials that, when used improperly, could scratch or impale their human operators, or are simply uncomfortable to interact with. Conversely, many of the materials that make up so-called soft robots — such as inflatable or jelly-like robots — may be too soft to carry loads and can be easily punctured with regular use and human interaction.
“We need something that takes advantage of the flexibility and gentleness of those soft materials but is also strong and durable enough to complete different tasks,” Kaur explains.
Robotics manufacturers and researchers have sought to create robotic personal assistants and bionic limbs or prosthetics that combine the durability of common robots with the gentleness of a soft robot.
To address the challenge, Kaur designed a new robotic body that might just have the right touch.
In SFU’s Additive Manufacturing Laboratory, Kaur developed lightweight, 3D-printed polymers structured with a unique truss design that can be “tuned” to different rigidities — from soft and rubbery to hard and metallic.
“The beauty of using 3D printing is that it gives us the ability to manufacture the fingers very efficiently,” says Kim, who leads the development of sustainable 3D-printing materials and whose lab will further develop the technology now that Kaur is graduating.
“The process is easily scalable. And, 3D printing can use less-wasteful and more sustainable materials in the manufacturing itself.”
While the 3D printer makes the fingers, Kaur embeds sensors (also 3D-printed) that detect pressure and strain, mimicking a human’s ability to sense the squeeze of a hand. The material is flexible and moves like a human finger but also has shock- and vibration-absorption properties that are suitable for the electrical components it will contain.
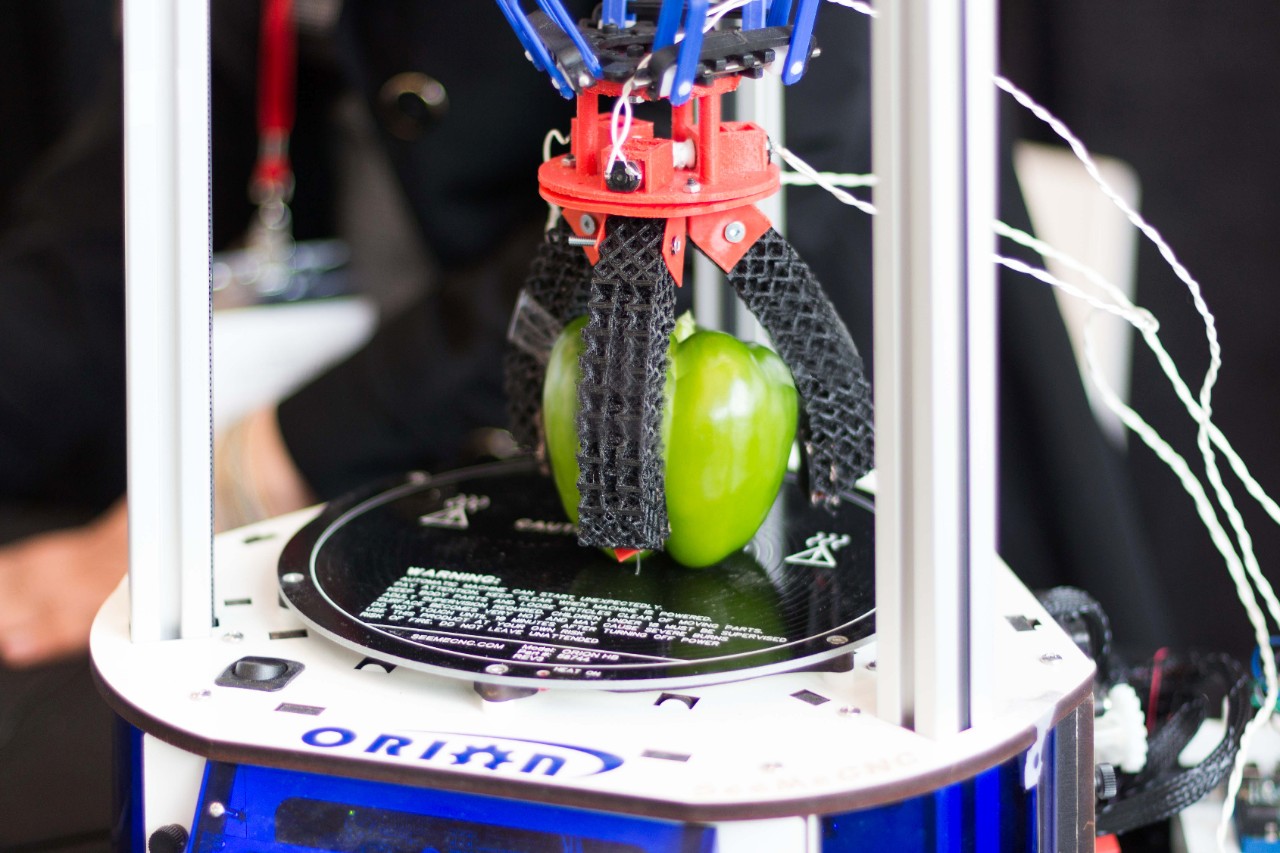
Kaur and Kim then tested the robotic finger technology by creating a robotic gripper capable of adeptly handling soft objects such as bell peppers, tomatoes— even eggs — without breaking or puncturing the objects. The technology could have applications in new kinds of prosthetic limbs and humanoid robots that are both durable enough for everyday use, and soft enough to complete delicate tasks.
The research is expected to be published this summer while the team awaits news on a patent for which they’ve applied. Kaur is also collaborating with fellow researchers to create a robotic prosthetic hand from her innovation.
“To see my results getting used for an application like this, it’s very meaningful to me,” says Kaur. “This research is very exciting and I look forward to seeing how it can make robots safe and accessible for others.”