Environmental Model Function
Description:
Input dimensions: 4Output dimensions: dY = ds x dt
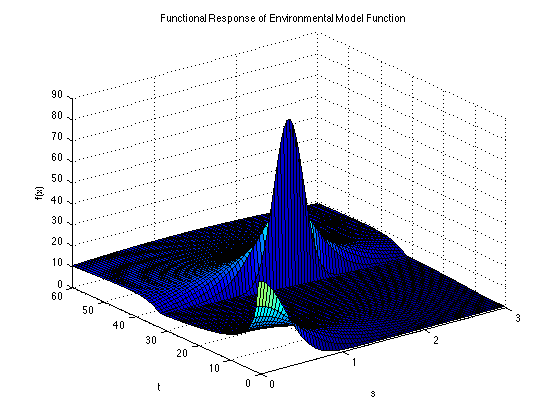
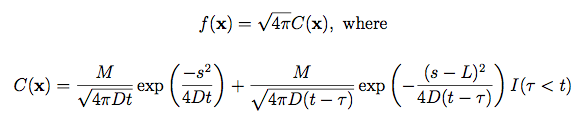
The Environmental Model function models a pollutant spill caused by a chemical accident. C(x) is the concentration of the pollutant at the space-time vector (s, t), where 0 ≤ s ≤ 3 and t > 0. I is the indicator function.
A mass M of the pollutant is spilled at each of two locations, denoted by the space-time vectors (0, 0) and
(L, τ). Each element of the response is a scaled concentration of the pollutant at the space-time vector
(si, tj), for i = 1, …, ds and j = 1, …, dt.
Bliznyuk et al. (2008) use ds = 5 locations and dt = 200 times: s = 0, 0.5, 1, 1.5, 2.5 and t = 0.3, 0.6, …, 50.7, 60.
In the plot above, the response is shown as a function of s and t, for the values M = 10, D = 0.07, L = 1.505 and τ = 30.1525.
Input Domain:
The input parameters of interest and their usual input ranges are:| M ∈ [7, 13] | mass of pollutant spilled at each location |
| D ∈ [0.02, 0.12] | diffusion rate in the channel |
| L ∈ [0.01, 3] | location of the second spill |
| τ ∈ [30.01, 30.295] | time of the second spill |
Code:
Reference:
Bliznyuk, N., Ruppert, D., Shoemaker, C., Regis, R., Wild, S., & Mugunthan, P. (2008). Bayesian calibration and uncertainty analysis for computationally expensive models using optimization and radial basis function approximation. Journal of Computational and Graphical Statistics, 17(2).
For questions or comments, please email Derek Bingham at: dbingham@stat.sfu.ca.
LastUpdated
Copy