Robot Arm Function
Description:
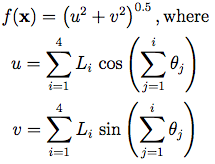
Dimensions: 8The Robot Arm function, used commonly in neural network papers, models the position of a robot arm which has four segments. While the shoulder is fixed at the origin, the four segments each have length Li, and are positioned at an angle θi (with respect to the horizontal axis), for i = 1, …, 4.
The response is the distance from the end of the robot arm to the origin, on the (u, v)-plane.
Input Domain:
The input variables and their usual input ranges are:| θ1 ∈ [0, 2π] | angle of the first arm segment |
| θ2 ∈ [0, 2π] | angle of the second arm segment |
| θ3 ∈ [0, 2π] | angle of the third arm segment |
| θ4 ∈ [0, 2π] | angle of the fourth arm segment |
| L1 ∈ [0, 1] | length of the first arm segment |
| L2 ∈ [0, 1] | length of the second arm segment |
| L3 ∈ [0, 1] | length of the third arm segment |
| L4 ∈ [0, 1] | length of the fourth arm segment |
Code:
Reference:
An, J., & Owen, A. (2001). Quasi-regression. Journal of Complexity, 17(4), 588-607.
For questions or comments, please email Derek Bingham at: dbingham@stat.sfu.ca.
LastUpdated
Copy