The following documents an exploration of the role of gesture, or subtle expressivity as a means of computer human interaction.
"We are standing right now on the threshold of the robotic era. Once robots start arriving in the job market in significant numbers -- something that we will see happening within a decade or so -- they have the potential to dramatically change the world economy." Brain, 03 http://marshallbrain.com/robotic-freedom.htm (founder of How Stuff Works )
We are already seeing the first signs of what is to come. Robots are being used in such public spaces as hospitals and factories to support simple repetitive tasks, or those that are deemed too hazardous for people in general. The entertainment sector has seen a sharp rise in the popularity of such fancy electronic gadgets as Sony's Aibo or the illustrious Furby of late 90's fame. The predominant view of the scientific community at large is that autonomous vehicles, or robots, will only increase in popularity and prevalence in our everyday world.


In considering the ramifications of an increasing technological presence in
a human environment, one of the challenges facing humans will involve obtaining
a sense of trust that these automata are aware of people around them and have
the ability to interact in ways that are intuitive and natural. We will need
to be able to respond and react to them much as we would to another person.
The imitation of gestures intrinsic to human movement may be the key link. Merriam-Webster
defines gestures as "to express or emphasize an idea, sentiment, or attitude."
This ability is of vital importance if we can ever expect to 'trust' the intentions
of an autonomous vehicle. To design a robot that replicates human 'ideas', 'sentiments',
or 'attitudes' was an interesting challenge that drove our project forward.
Process
Products with personality and presence arose as a predominant theme in the course readings and class discussion. This refers to how an organized assemblage of plastic, metal and circuitry can be constructed so that it breaks the boundary of a simple artefact in our environment and enters the world of meaning. One of the questions we kept returning to in the course of our project was, "What will it be like to share space with a bunch of scurrying semi-mindless automata?" Issues such as how a human would navigate around autonomous vehicles in public spaces, what information a robot would need to communicate and how would it do so in order for the human to gain an understanding of the robots intentions were of particular interest.
Lego Robotics, our development platform, certainly provided some of the personality
or unique character that we were looking for. Our first experiments with many
of the sample designs included in the kit showed us that even the means of locomotion
used by a particular bot gave it a specific kind of feeling and personality.
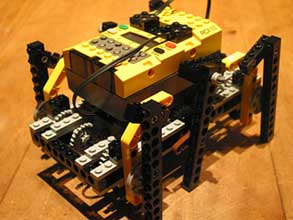
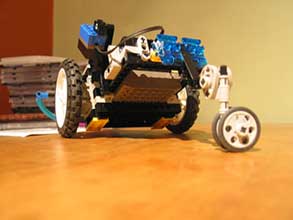
Some of the sample designs we tried were basic 'tank' rovers, a spider-bot,
the robo-arm and a game of two robots interacting called Robo-Tag. The organic,
asymmetrical movements of the spider bot's legs gave it a menacing 'creepy'
feeling, while more conventional locomotion approaches such as wheels or treads
were more machine like and felt less 'alive'. We settled on a basic tank bot
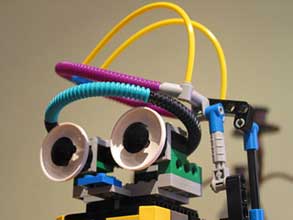
design for simple reliable movement but also wanted to incorporate an iBot
camera in order to get our bot to respond to visual information in the environment.
Basically we wanted our robot to be able to 'see' a target object and respond
according to a set of rules.
As our robot emerged, it became apparent that we were succeeding in designing and building a 'seeker' robot that would be able to 'see' a target color, track its movement by rotating its camera and move in the targets direction. A task that will surely be common in the imagined future of a world filled with such devices. What we noticed with this behaviour however was just how mechanical and uninformative it was. We were able to design the behaviour but had not found the meta level of communication needed to enhance the action. You could get a sense that the robot was changing direction, but it became important for us to emphasize the fact that this autonomous vehicle was on the move and the need for it to express its intentions to those in its general vicinity. This led us to the principles of character animation where an action will most typically have a preliminary anticipatory gesture. We wanted to demonstrate the idea that a robot should also perform some anticipatory movement as a means to convey its intention in the real world.
> Doodles >> Sketching allowed us to visual some designs that would always seem 'just out of reach'.
Historical context
It is assumed that the pursuit of automated machines interacting with humans is a recent technology driven phenomena, when in fact, projects of this kind date back hundreds of years or more. In the 18th century, people like Jacques de Vaucanson built exquisitely crafted clockwork animals and humanoids long before computers or electric motors were invented. These early attempts at robotic creation astounded the public of the time in both the realistic movements the automata were able to perform and the seemingly lifelike behaviours they demonstrated.
The industrial era heralded the image of the mechanical man as a cultural fixture, and literature was populated with such representations as the tin man in the Wizard of Oz, and the chillingly distopic portrayals of Mary Shelley's Frankestein, Fritz Lang's Metropolis and Karel Capek's RUR (Rossum's Universal Robots), the dramatic work in which the term "robot" originated.