
Introduction
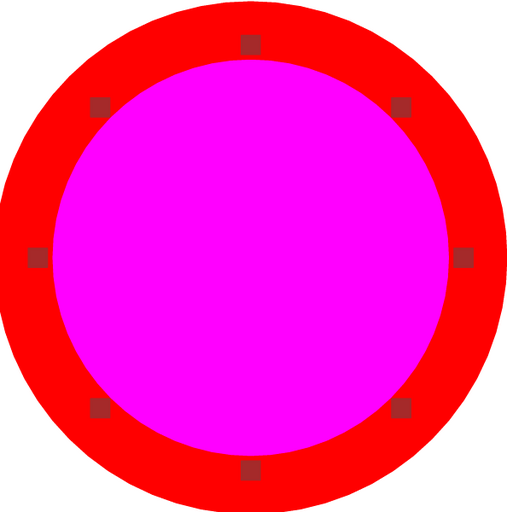
Figure 1: Layout for a simple bearing.
This parameterized cell is a journal bearing or rotary joint. Also known as a hub, a bearing allows parts to rotate in plane about an axle.
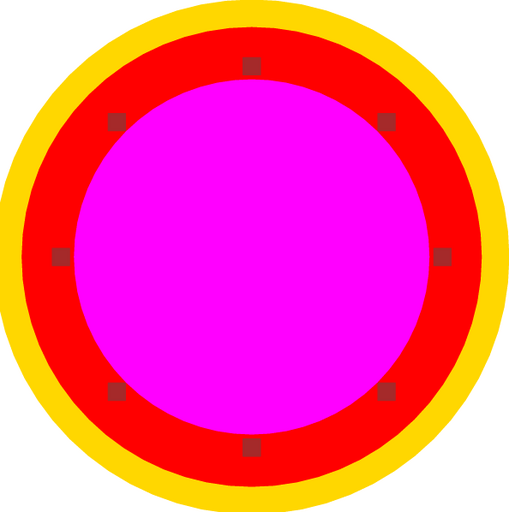
Figure 2: Layout for a simple bearing with a POLY0 ground plane.
Theory
Please refer to the documentation for the gear parameterized cell for additional information.
Backlash
Unfortunately, this bearing design will have significant backlash. Because of the minimum spacing rules, there will be significant spacing between the gears' wheels and axels. There will also be spacing between the teeth of different gears.
Axel
The smaller the diameter of a bearing's axel, the smaller the gear's friction torque [1].
Parameters
Any parameter may be modified, if necessary, to meet design rules. Typically, this involves increasing parameters that specify distances, so that minimum line width and minimum line spacing rules will not be violated. This has been extended to the convention of specifying a zero for some parameters to obtain an instance of the minimum size.
In addition to the parameters listed below, several technology parameters also influence the implementation of parameterized cells. This data must be present in the technology library.
| Name | Description | Range | Units |
|---|---|---|---|
| radius | The distance from the cell's centre to the POLY1 edge. Except for the possible POLY0 ground plane, the bearing fits completely within a circle with the given radius. | [0,∞) | um |
| include_poly0 | If true, a POLY0 ground plane will be included in the cell. The POLY0 ground plane can eliminate most electrostatic attraction between the bearing and the substrate bulk. | true/false | - |
