
Mo H Zareei, Dale A. Carnegie, Dugal McKinnon, Ajay Kapur
Rippler: a Mechatronic Sound-sculpture
Abstract
For almost half a century, musicians, artists, and researchers have been using mechatronic techniques in order to develop new musical systems, build new instruments and sound-sculptures, and to create new works of experimental music and sound art. Among the significant body of work done in this field, this paper focuses on those whose sound-generating mechanism is entirely based on electromechanical actuation of non-musical objects in an effort to aestheticize their normally mundane existence. Followed by a discussion on the characteristics of such works, this paper overviews the use of metal sheets in sound art, and introduces a new mechatronic sound-sculpture designed and developed by the first author that employs a sheet of steel to amplify the actuation noise of its mechatronic components, in an effort to aestheticize its conventionally non-musical sound.
1. INTRODUCTION
Over the past few decades, the integration of mechatronics in experimental music and sound art has grown greatly. There has been an extensive body of works in a rather wide contextual range, where mechatronic machines and robotic techniques have been used to create new musical instruments, compositions, performances, and sound installations. From a conceptual perspective, it has been argued that these works can all be divided into two main categories (Zareei, Carnegie & Kapur, 2014). In one, mechatronic machines have been used in order to create instruments that are inspired by conventional and already-existing musical instruments. These works, which are sometimes referred to as “musical robotics”, can be identified as “mechatronic musical instruments” and described as conventional musical instruments with modified, augmented, or automated performative capabilities. As Charles Fowler argues, the mechatronic techniques used in creation of these works are “mechanisms that replace the human performer, but not the instrument itself” (Fowler, 1967).
In the second approach, whose ideological backgrounds can be traced back to Luigi Russolo’s Futurist Manifesto (Russolo, 1986), mechatronics are used as means to explore new sonic territories and to create sounds that are conventionally categorized as “extra-musical”. Unlike mechatronic musical instruments, works that fit into this category are not deterministic systems aiming to achieve a certain “musical” sound and output. Instead, they incorporate mechatronic techniques in conjunction with non-musical objects, and their sonic output is “noise”. We identify this second approach with the term “mechatronic sound-objects”, and describe them as apparatuses that use mechatronics to mechanically actuate or modify a non-musical object, in order to explore the potential aesthetic values of its normally mundane sonic aspect.
The following section outlines some significant examples of mechatronic sound-objects, along with a discussion on the use of non-musical objects in contemporary sound art. Section 3 introduces Rippler and provides detailed information on its sound production mechanism, technical features, and compositional frameworks in which it has been employed. Section 4 is dedicated to a discussion on how works composed for Rippler can be aesthetically and ideologically linked to the foundations of glitch art, and in particular, glitch music, where the audible failure of the technological medium becomes an aesthetic element.
2. BACKGROUND AND RELATED WORK
In summary, the difference between the categories of mechatronic musical instruments and mechatronic sound-objects introduced in the previous section can be explained as follows: in the first group, mechatronic components are used to actuate a musical object (e.g. guitar string, drum skin, etc.), while in the second group, they are used to actuate a non-musical object. [1] Considering the focus of this paper, i.e. a mechatronic sound-sculpture in which sound generation happens through actuation of a sheet of steel, this section provides an outline on some of the significant examples of contemporary mechatronic sound-objects, and overviews some related instances of works of sound art which employ sheets of metal as a sound source.
2.1 Mechatronic Sound-objects
In the 1960s, the Logos Foundation was initiated by Godfried-Willem Raes, one of the key pioneers of mechatronic sound art, in defiance of what he regards as the “authoritarianism of the music production and reproduction” (Raes, 1992). Aligned with the anti-authoritarianism movements of the time, Logos Foundation could be seen as an effort to defy the limitations dictated by the music industry. This defiance was primarily reflected in the form of the design and construction of new sound-objects and sound-sculptures using electromechanical machines and technologies––many of which are discussed in (Raes, 1992). Another equally influential precursor of mechatronic sound art is Trimpin. His numerous works of kinetic sculpture and sound art, as presented in (Focke, 2011), continue to influence artists and musicians to this date. Like many inventions of the Logos Foundation, Trimpin’s approach is often sonic recycling of found objects. This sonic recycling is done through actuation of these non-musical objects using mechatronic components such as motors and solenoids,[2] in order to create mechatronic sound-objects and sound-sculptures. Trimpin’s approach can be also found in works such as Gordon Monahan’s Multiple Machine Matrix (Monahan, 1994), as well as the Fluxus machines of Joe Jones and a number of others mentioned in Alan Licht’s Sound Art (Licht et al., 2007). Nevertheless, Trimpin’s and Logos Foundation’s wide range of creations is not specifically focused on the “mechatronic sound-objects” as is conceived here. In many cases, their mechatronic inventions incorporate already-existing musical instruments and therefore, based on the classification described in the previous section, fit into the “mechatronic musical instruments” group.
Among more recent examples of mechatronic sound-objects, works of the Canadian artists Nicolas Bernier and Martin Messier are notable. Bernier’s Prix Ars Electronica winner Frequencies (a) is an audiovisual performance “combining the sound of mechanically triggered tuning forks with pure digital sound waves. The performer is triggering sequences from the computer, activating solenoids that hit the tuning forks with high precision” (Bernier, 2012), as synchronous beams of bright light accompany the sound. Sewing Machine Orchestra by Messier is also an audiovisual project in which “computer processing transforms the functional sounds of eight 1940s Singer sewing machines, mounted on stands, into a vivid, dancing weave of hums, whirrs, and beats, accompanied by suitably pulsating lights” (Cowley, 2013).
Remarkable examples of contemporary mechatronic sound-objects can be found among creations of Zimoun and Pelang. In the majority of their solo works, as well as those that they make in collaboration with one another, they create large-scale installations using a great number of what they refer to as “prepared” actuators: basic mechatronic components (DC motors, solenoids, etc.) that are attached to some non-musical objects such as pieces of wire, cardboard boxes, cotton balls, etc. The concurrent actuation of these non-musical objects turns them into sound-object units that together form an ambient wall of sound, filling the entire gallery space.
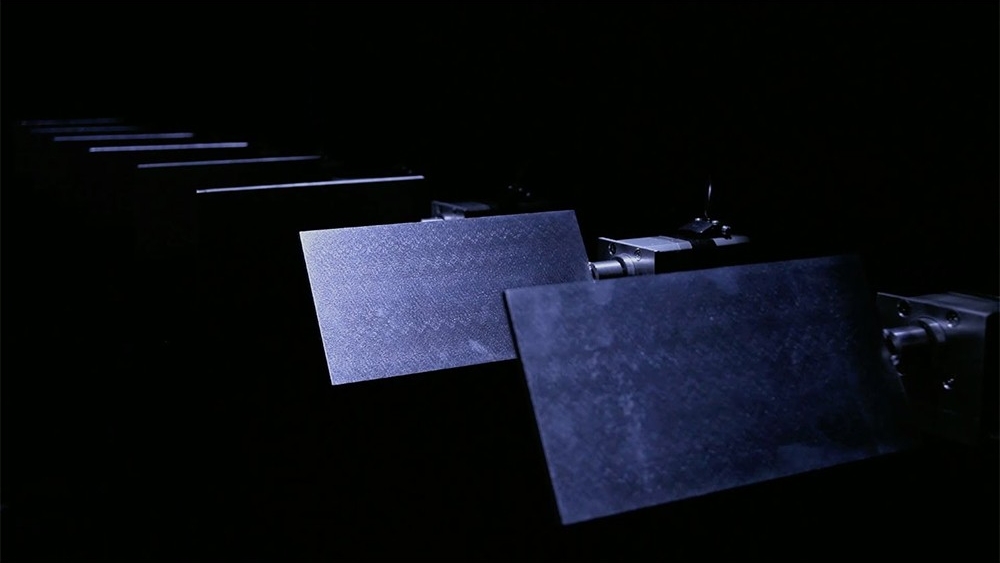
The same reductionist strategy of using multiple numbers of the same sound-object unit (each comprised of a basic mechatronic component and a non-musical object as the sound source attached to it) used in these works, can be noticed in Daito Manabe’s Motor Music Test (Manabe, 2013). In this work, the non-musical objects are a series of identical metal plates that are put into rotation by heavy-duty motors (Figure 1).
2.2 Metal Sheets and Sound Art
The use of metal sheets in conventional composition and performance-based musical contexts ranges from thunder sheets and gongs used in traditional and classical ensembles and orchestras, to custom-built percussive instruments used by experimental bands such as Einstürzende Neubauten. The rich and unique sonic characteristics of metal sheets have also drawn attention of the artists whose works fit more in the gallery-based and perhaps, more experimental side of sonic and musical arts.
Using electromagnetic forces to excite a sheet of metal––which was rather marginally featured in Godfried-Willem Raes’s HEX (1988)––is a practice widely instantiated in various works of sound-sculpture and sound installation by artist Ted Apel (e.g. Coupled Shifts (1996), Portrait of Malleus (1997), and surface osculations (1998) (Figure 2). In these works, Apel treats metal plates as transducers, creates feedback loops between the acoustic vibration of excited plates and electronically produced signals, and experiments with natural resonant frequencies of metal plates.

Closer to the purpose of this paper are perhaps those works in which the excitation of the metal sheets is done mechanically and by means of mechatronics. Among various works of kinetic art and sound-sculpture developed by artist Len Lye, Blade (1987) can be noted as a good example of this. Blade is a sound-sculpture that consists of a standing sheet of steel with a fixed base, which is struck by a motorized cork hammer (Lye, 1976). A more recent and more tightly related example is Psch (2006) by Raes (Figure 3).

Following his experiment with a solenoid-actuated metal sheet in a previous project called ThunderWood (2000), Psch was an effort to provide the collaborating composers with “an automated instrument that would be capable of producing the kind of ‘reversed cymbal’ sound and similar explosive noises so typical for techno music” (Raes, 2006). After a series of experiments, the final design “ended up with 12 driving solenoids with individual metal sheets of different thickness[es]” (Raes, 2006). MIDI messages are used to drive the solenoids and set the sheets in vibration, creating a range of different timbres and noises.
From a technical point of view, Psch would perfectly fit into the “mechatronic sound-object” grouping as it employs a mechanism that is purely based on actuation of non-musical objects through mechatronic components. However, aesthetically and as a piece of sculpture, it does not seem to enjoy the common key feature that most of the recent examples of mechatronic sound-objects presented in 2.1 share: that is their extremely minimalistic stance and attention to detail with regard to form, design, and structure. As will be discussed in the following section, although the sound generating mechanism in Rippler is rather similar to the one in Psch, the ideology behind its design reflects the same minimalistic approach and aesthetic values as those of the works discussed in 2.1. Through their reductionist and rigorously transparent structure, these works emphasize the physical existence of their material. Being aware of their multi-sensory reception, these works value the materiality and visual aspect of their components, almost as highly as their sonic aspect. In addition to the minimalist and reductionist aesthetic similarities, it is also this ideological principle that ties Rippler to the contemporary examples of mechatronic sound art introduced in 2.1.
The primary motivation behind the design of Rippler is in fact rooted in the sonic artifacts produced by a previous sound-sculpture entitled Rasper, developed by the first author. Rasper’s sound-generating mechanism is based on putting a sharp piece of spring steel in contact with a rotating disk (Zareei, Carnegie, & Kapur, 2014). The disk is rotated using a DC motor and the spring steel is actuated using a push solenoid. Therefore, the actuation noises of the employed mechatronic components form a kind of sonic byproduct and act as unplanned audible glitches in the system. It is these unwanted sonic byproducts that has inspired the design of the following sound-sculptures: Mutor, whose sonic output is entirely based on the buzzing of a DC motor (Zareei, Carnegie, Kapur, & McKinnon, 2014), and Rippler, in which the actuation noise of a push solenoid is amplified and transduced through a thin sheet of steel.
3. RIPPLER
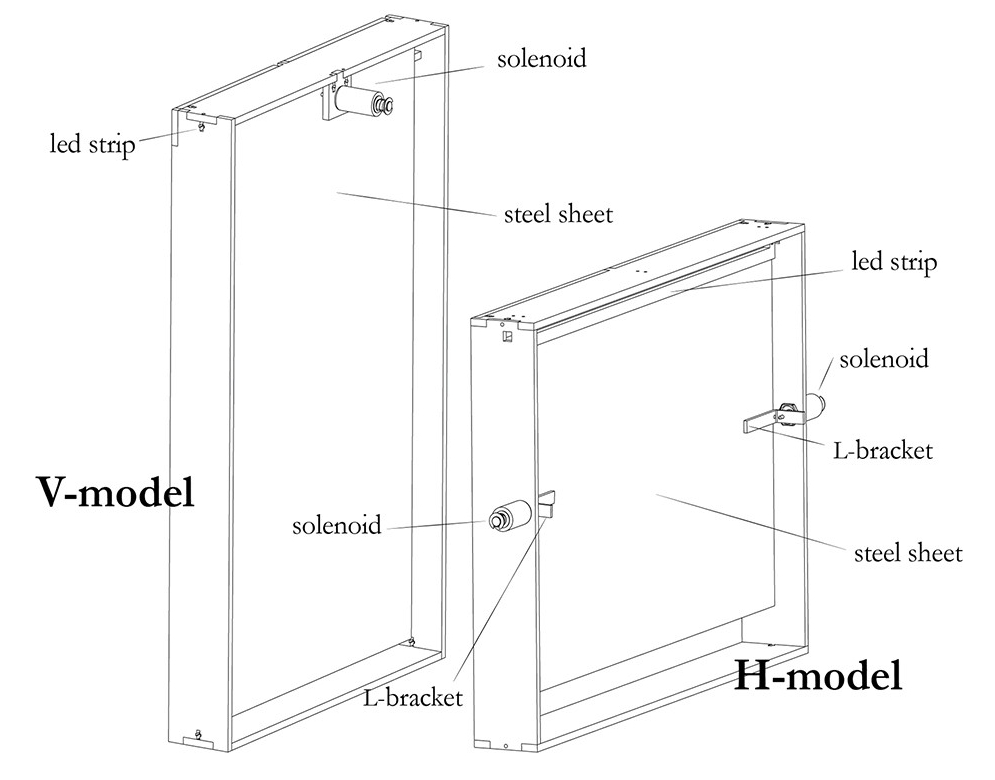
Rippler is a mechatronic sound-sculpture whose sound-generating mechanism is based on mechanical excitation of a thin sheet of steel using linear actuators (12V push solenoids). The instrument is designed in two different models: horizontal (H-model) and vertical (V-model) (Figure 4). Both models are comprised of a thin sheet of steel, a strip of bright Light-Emitting Diodes (LED), which is placed in an open-faced square tube made of white acrylic, and push solenoids (2 in H-model and 1 in V-model), which are all held together in a transparent acrylic frame. Aside from the orientation of the steel sheet and the frame and the number of solenoids, the two models slightly vary in terms of the direction of actuation, as well as the thickness of the sheet. In both models, microcontroller programming is used to drive the solenoids and put the steel sheet into motion and vibration. The frequency and amplitude of the actuation is controlled using Musical Instrument Digital Interface (MIDI) messages. [3] In addition, in both models, each solenoid has a corresponding strip of LEDs whose luminosity is associated with the amplitude of the actuation. The use of mechatronic and micro-controller programming makes it possible to use Rippler in both interactive live-performance and self-governing installation settings. [4]

3.1 Design
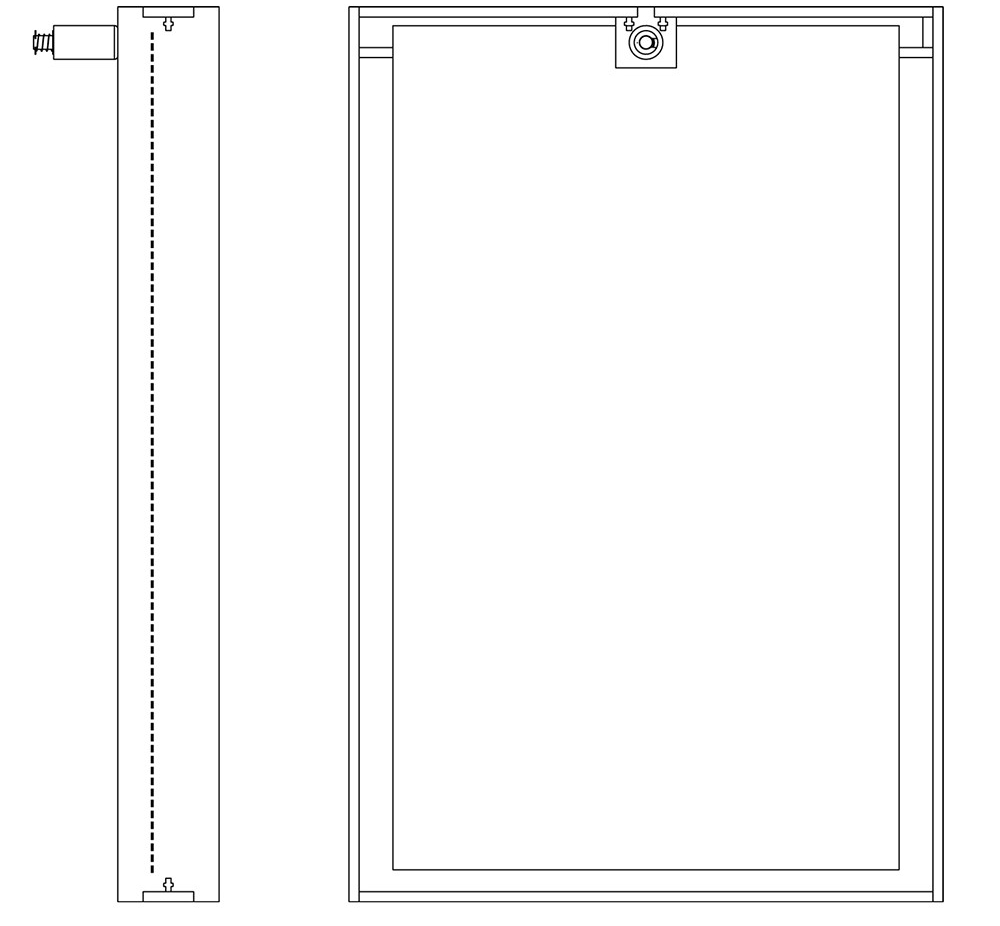
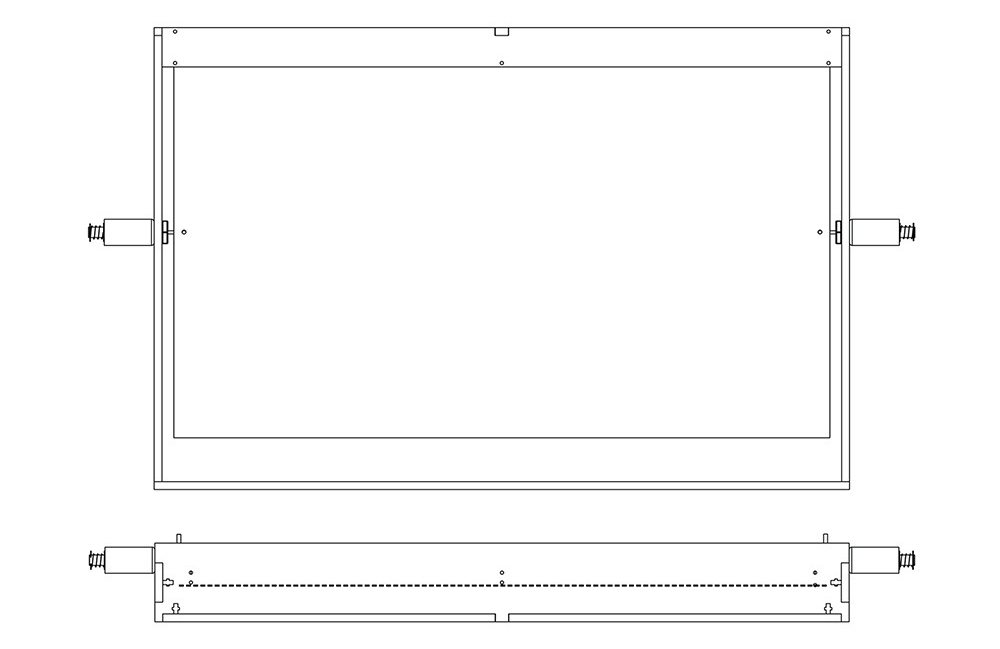
Rippler is designed using computer-aided design (CAD) technology. After creating 3D models of the solenoids and the sheets, the frames, LED square tubes, and L-brackets are drafted and put together in the 3D mechanical CAD program SolidWorks (figures 5 and 6).

3.1.1 V-model
In Rippler V-model, a 0.08mm thick 300mm×500mm sheet of steel is placed vertically in the acrylic frame. One solenoid is mounted on back of the frame at the top, using a small laser-cut bracket. The sheet is attached to the solenoid’s shaft and kept hanging straight in the frame from the top. The topside of the frame is a three-sided square tube with its open side facing backwards. A 300mm long LED strip is glued on the front side of a 300mm×15mm piece of 6mm acrylic that is placed in the LED tube and the LEDs are facing forward. When the solenoid receives a MIDI note-on message it pushes out and rapidly moves the sheet forward, producing a strike of noise. When the MIDI note-off is received, the return spring of the solenoid pulls the solenoid shaft and the sheet back to the rest position. These movements set the sheet into motion vibration, which then results in sound. Single strikes create a decaying sound whose amplitude depends on the MIDI velocity [5] value applied to the solenoid, and repeated strikes produce a continuous sound. The LED strip is controlled by the same signal that drives the solenoid and all the LEDs turn on and off as the solenoid pushes out and in. The light of individual LEDs that is diffused by the acrylic lights up the entire front and bottom panel of the LED tube. Reflections of the LED tube on the steel provide further visual feedback on its mechanical excitation.
3.1.2 H-model
The H-model uses a steel sheet that comes with the same width and height as the one in the V-model, but is 0.05mm thick and placed horizontally in the frame. Two solenoids are mounted on each side of the frame, which are attached to both ends of the sheet through laser-cut acrylic L-brackets. The topside of the frame is a three-sided square tube with its open side facing backwards. Two 250mm long strips of LEDs are glued on the front side of a 500mm×15mm piece of 6mm acrylic that is placed in the LED tube. The LED strips are glued next to each other, facing forward, forming one 500mm long LED strip that is divided into two independently controlled halves. When the solenoids receive a MIDI note-on, they push out and move the sheet’s sides inwards, producing a strike of noise. As they receive the MIDI note-off, the return springs pull the solenoid shafts and the sheet back to the rest position. Similar to the V-model, repeating this cycle creates a sound that comprises the series of recurring noise strikes whose sonic characteristics are a function of the amplitude of the actuations––i.e. the MIDI velocity value applied to the solenoid––and the rate of the repetition. The solenoids are independently driven.
Therefore, in a continuous series of actuations different phasing effects can be achieved. This ranges from the constructive interference (when both solenoids are in the same phase), that leads to simultaneous contraction of the sheet from both sides, to the deconstructive interference (when solenoids are at the exact opposite phase), which results in moving the sheet sideways while its kept straight (non-bent). Each half of the LED strip is controlled by the same signal as the corresponding solenoid. Therefore, the phasing and the interference patterns can be visually perceived through the luminosity of the LED tube’s front panel and its reflections on the sheet.
3.2 System Overview
Figure 9 shows a flowchart of the different parts of the system and demonstrates the process of production of the audiovisual output. MIDI messages are sent to an Arduino [6] Mega, which has been flashed to a MIDI device using HIDUINO firmware (Diakopoulos & Kapur, 2011). The driver board is a custom-designed printed circuit board (PCB). Appropriate output signals are generated by the Arduino in response to the incoming MIDI velocities, and then used to drive the solenoid and the LEDS through the driver board. Separate MIDI pitch values are used to address each solenoid (and the corresponding LED strip).
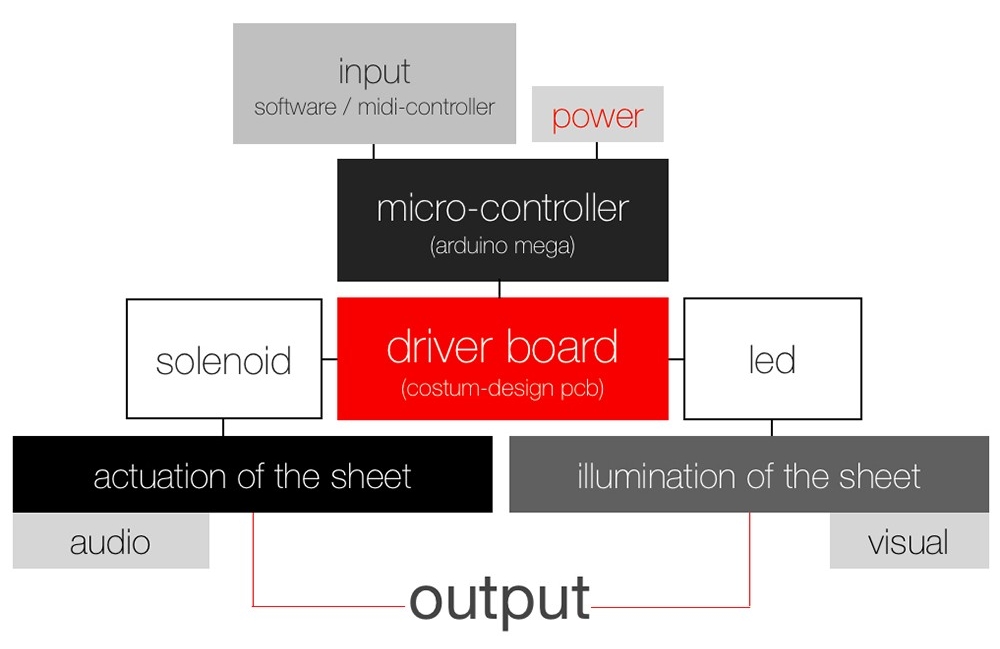
MIDI velocity values correspond to the actuator’s stroke length and the brightness of the LEDs. Higher stroke lengths result in wider displacement of the steel, and therefore, stronger noise strikes accompanied by brighter bursts of light.
3.3 Sonic Evaluation
In order to study some sonic characteristics of Rippler, a series of tests were carried out on recordings of the steel sheet when excited by solenoid strikes. Recordings of both models at various solenoid actuation amplitudes (i.e. various MIDI velocity values) were created and used to make an analysis of sonic capabilities of Rippler in both frequency and time domains.
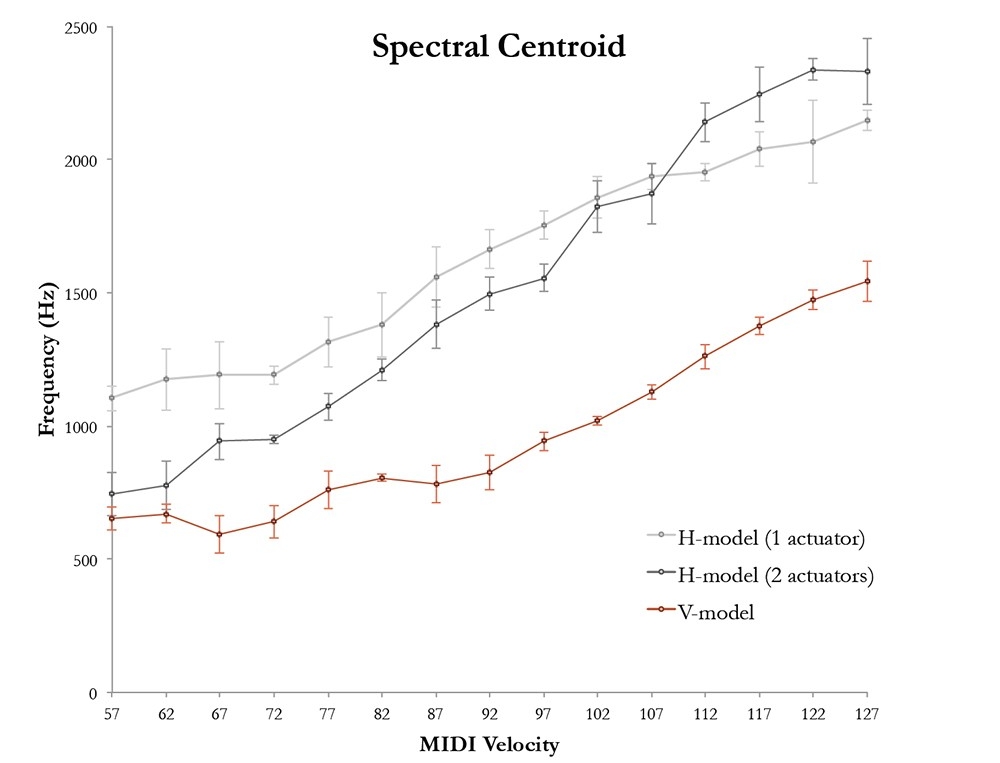
An assessment of the frequency response of the instrument is presented in Figure 10. This figure shows the concentration of the center of mass of the frequency spectrum for recordings of both models. The outputs were generated by sending a 64th-note long MIDI note to the solenoid at 120BPM. Two separate recordings were made for the H-model: one with simultaneous actuation of both solenoids and one with actuation of a single solenoid. Five different recordings were made for each MIDI velocity input value, ranging from 127 down to 57 every 5 steps, [7] and the results were calculated as an average of these five values with the following specifications: (sample Rate: 44100 sample/s, window Function: Hanning, window Size: 1024 samples). This center frequency, which is greater for stronger excitations, is notably higher for the H-model. It can also be noticed that in the H-model, a relatively wider dynamic range in terms of frequency is achievable with simultaneous actuation of both solenoids.
3.3.2 Time Domain
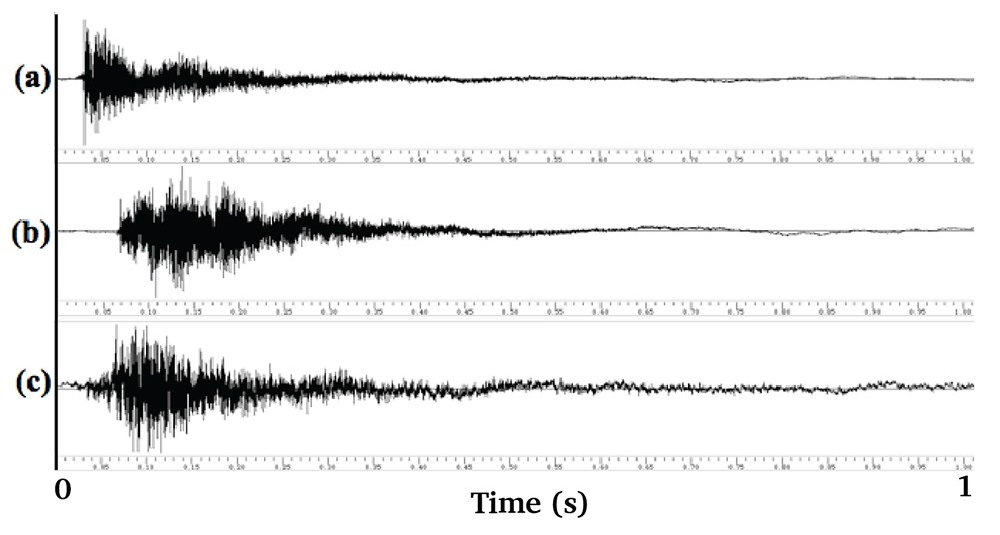
The percussive nature of Rippler’s sound is exhibited in Figure 11. Recordings of a single strike generated by a MIDI velocity of 127 for both models (single and double actuation for the H-model) are represented in waveform format to provide general examples of the instrument’s different types of sonic outputs. The top two waveforms represent recordings of the H-model in a single actuation (top) and a double actuation (bottom). In the H-model, the substantially shorter attack time in single actuation mode and relatively longer decay time in double actuation mode creates a notable timbral difference between the two modes. By comparing different recordings of the outputs caused by the same MIDI velocity value, latencies of approximately 30ms for single actuation, and 60ms for double actuation were noticed. The lack of such latency in the V-model waveform leads to the conclusion that this latency depends on the mechanics of actuation and the mode of excitation. Additionally, the V-model waveform (bottom) reveals a notably longer attack time, as well as a slightly longer decay time.
3.4 Compositional Strategy
With the help of microcontroller programming, Rippler can be used not only in a live performance where a performer controls it in real-time, but also in a self-governing installation setting. Nevertheless, the percussive sonic quality of Rippler naturally calls for its use in rhythmic contexts. Therefore, whether the input messages are triggered and controlled by a live performer or pre-programmed, the sonic output is always structured and expressed through patterns of metric rhythms. This can be noticed both in Artifice (2014), a live performance at the 20th International Symposium on Electronic Art (ISEA), and machine brut(e) (2015), a compilation of installation pieces composed for Rippler, Rasper, and Mutor. [8] In both cases, repetitive and pulse-based rhythmic patterns are used as a framework to give accessibility to Rippler’s noise.
In this way, these works can be compared to digitally produced sound-works that are often known as glitch music. In the majority of examples of contemporary glitch music, grid-based rhythmic structures, loops, and repetitions are used to bring the noises of digital technologies back to the domain of aural attention and appreciation (Zareei, Kapur, & Carnegie, 2013). Therefore, regardless of the different mediums they use, works composed for Rippler and these examples of digital glitch music share at least two key features: 1) their rigorous minimalistic approach and the extensive use of repetition and iteration, 2) their Russoloian ideological background that is reflected in their use of noise as an aesthetic element.
4. DISCUSSION: AESTHETICS OF FAILURE
Ever since Luigi Russolo’s Futurist Manifesto The Art of Noises (Russolo, 1986)––in which the integration of machine noise in music was formally announced––sonic by-products of technological developments have been a center of attention for experimental musicians and sound artists. Commencing with Russolo’s intonarumori (ensemble of noise-intoners), drawing inspiration from aural artifacts of technological developments has continued to this date, and is presently realized in the contemporary minimalistic style of laptop-based electronic music known as glitch.
In his article Aesthetics of Failure, Kim Cascone argues that “it is from the “failure” of digital technologies that this new work (i.e. glitch) has emerged (Cascone, 2000). He continues:
While technological failure is often controlled and suppressed … most audio tools can zoom in on the errors, allowing composers to make them the focus of their work. Indeed, “failure” has become a prominent aesthetic in many of the arts in the late 20th century, reminding us that our control of technology is an illusion, and revealing digital tools to be only as perfect, precise, and efficient as humans who build them. New techniques are often discovered by accident or by the failure of an intended technique or experiment (Cascone, 2000, 13).
As mentioned earlier, this is precisely what initiated the design of Rippler. In the medium of mechatronic music, the inherent actuation noise of the mechatronic machines can be perceived as the failure of the system in the delivery of the desirable clean “musical” sound. However, just as digital glitch music aims for an aesthetic recycling of the audible errors of the computer or the sound system, by focusing on the incidental actuation noise of the mechatronic component experienced in a previous work (Rasper) and highlighting it through a sheet of steel, Rippler uses the failure of the previous sound-producing mechanism as its primary aesthetic material. With this in mind, works composed for Rippler can be seen as a transcription of digital glitch music in the physical realm, where glitch is produced acoustically and mechanically. By exhibiting the entire sound-generating mechanism, these works take glitch music outside of the black boxes of computers, and make it more accessible. As Landy argues, “inexperienced listeners tend to find sound-based works more accessible when introduced in a convincing manner within audiovisual contexts regardless of what they are” (Landy, 2007). In this way, these works draw attention to something that is conventionally considered mundane or undesirable, by bringing it to the foreground both audibly and visibly.
Drawing inspiration from both glitch music and works of sound art discussed in Section 2, Rippler aims to make its conventionally non-musical sound accessible and appreciated by regulating it rhythmically and underscoring its physical existence. On one hand, the instrument’s design makes it perfectly capable of producing metric and pulse-based rhythms. On the other hand, the bodily presence of the metal sheet and the physicality of its sound generation is celebrated in a minimalistic and reductionist sculpture form, and further accentuated in accompanying arrays of white light (see Figure 12). The synchronizing bursts of light shining through the light panel and reflecting off of the sheet, highlight its rippling motions and vibrations, and create further visual feedback. This clear correlation between the aural and visual presentations of the pulsating, syncopated, or interlocking rhythmic patterns helps tighten the audiovisual connectivity and boost the artistic expressivity.
[1] examples of mechatronic musical instruments can be found among works of Trimpin, Logos Foundation, Eric Singer, Ajay Kapur, Jim Murphy, etc. (Murphy, Kapur, & Carnegie, 2012).
[2] A solenoid is an electromechanical linear actuator that can be used to produce linear motion.
[3] MIDI is the most common means of connecting and communicating between electronic and digital musical instruments.
[4] Video documentation of Rippler can be found at: www.m-h-z.net/rippler.
[5] A MIDI message has several inbuilt messages including MIDI pitch, MIDI velocity, note on, and note off. The most basic messages are note on and off, which are typically used to signal the beginning and end of a musical note. MIDI pitch value corresponds to the number of the note and MIDI velocity value determines the forcefulness or amplitude of the note. Both MIDI pitch and MIDI velocity values are scaled from 0 to 127.
[6] An Arduino board is an open-source piece of hardware that consists of a microcontroller and a number of inputs and outputs, and is used to facilitate programming and incorporation into other circuits.
[7] Spectral Centroid indicates the distribution of the center of mass of the spectrum, and can be aurally perceived as the “brightness” of the sound.
[8] Video documentation available at: http://m-h-z.net/videos/
Bibliography
Bernier, N. (2012). Frequencies (a). Retrieved September 2, 2014, from www.nicolasbernier.com
Cascone, K. (2000). “Aesthetics of Failure: “Post-digital” Tendencies in Contemporary Computer Music”. Computer Music Journal, 24(4), 12–18.
Cowley, J. (2013). “Nicolas Bernier and Martin Messier: Object-based electronic music.” Music Works, (115).
Diakopoulos, D., & Kapur, A. (2011). “HIDUINO: A Firmware for Building Driverless USB-MIDI Devices Using the Arduino Microcontroller”. In Proocedings of the International Conference on New Interfaces for Musical Expression (NIME). Oslo, Norway.
Focke, A. (2011). Trimpin: Contraptions for Art and Sound. Seattle, Wash.: Univ. of Washington Press.
Fowler, C. B. (1967). “The Museum of Music: A History of Mechanical Instruments”. Music Educators Journal, 54(2), 45–49.
Landy, L. (2007). Understanding the Art of Sound Organization. Cambridge, Mass.: MIT Press.
Licht, A. (2007). Sound art: Beyond music, between categories. Rizzoli International Publications.
Lye, L. (1976). Len Lye’s Work (Sculpture). Retrieved September 1, 2014, from www.govettbrewster.com/Len-Lye/Work/Sculpture
Manabe, D. (2013). Motor Music Test. Retrieved September 2, 2014, from www.daito.ws/en/work/motor_music_test.html
Monahan, G. (1994). Multiple Machine Matrix (Sound Installation). Retrieved October 3, 2013, from www.gordonmonahan.com
Murphy, J., Kapur, A., & Carnegie, D. (2012). “Musical Robotics in a Loudspeaker World: Developments in Alternative Approaches to Localization and Spatialization.” Leonardo Music Journal, 22, 41–48.
Raes, G.-W. (1992). “A Personal Story of Music and Technologies.” Leonardo Music Journal, 2(1), 29–35.
Raes, G.-W. (2006). Psch. Retrieved January 13, 2015, from www.logosfoundation.org/instrum_gwr/psch.html
Russolo, L. (1986). The Art of Noises. New York: Pendragon Press.
Zareei, M. H., Carnegie, D. A., & Kapur, A. (2014). “Rasper: a Mechatronic Noise-intoner.” In Proceedings of the International Conference on New Interfaces for Musical Expression, 473–478. London, UK.
Zareei, M. H., Carnegie, D. A., Kapur, A., & McKinnon, D. (2014). “Mutor: Drone Chorus of Metrically Muted Motors.” In Proceedings of the International Computer Music Conference-Sound and Music Computing (ICMC-SMC). Athens, Greece.
Zareei, M. H., Kapur, A., & Carnegie, D. A. (2013). “Noise on the Grid: Rhythmic Pulse in Experimental and Electronic Noise Music.” In Proceedings of the International Computer Music Conference (ICMC). Perth, Australia.
Bios
Mo H. Zareei is a sound artist and music technology researcher. Using custom-built software and hardware, his experiments with sound covers a wide range from electronic compositions to mechatronic sound-sculptures and installations. Striving to turn the harsh, unwanted, and unnoticeable into the pleasing and accessible, Zareei’s work is particularly targeted at the point where noise meets grid-based structures. He is currently pursuing his PhD research on noise music and mechatronics at Victoria University of Wellington.
Dale A. Carnegie has a BSc in Theoretical Physics and Applied Mathematics, an MSc with first class honours in Applied Physics and Electronics and a PhD in Computer Science. He is currently the Professor of Electronic and Computer Systems Engineering at Victoria University of Wellington where he is also Head of the School of Engineering and Computer Science. He heads Victoria University’s Mechatronics Group, which specializes in Autonomous Mobile Robotics.
Dugal McKinnon is a composer and sound artist whose creative output encompasses acoustic, electronic and text media, and the intersection of these. His work has been performed in Asia, Australasia, Europe and North America. McKinnon established the Sonic Arts program at the New Zealand School of Music, Victoria University of Wellington, where he is also director of the Lilburn Studios for electronic music.
Ajay Kapur is currently the director of Music Technology at California Institute of the Arts. He received an interdisciplinary Ph.D. in 2007 from University of Victoria with a focus on intelligent music systems and media technology. Kapur graduated with a BS in Engineering and Computer Science from Princeton University in 2002. A musician at heart, trained on drumset, tabla, sitar and other percussion instruments from around the world, Ajay strives to push the technological barrier in order to explore new sounds, rhythms and melodies.




F T I