Artificial Muscles (EAPS)
February 07, 2017
We are mainly focusing on the use of Dielectric Electro-Active Polymers (EAP) for robotic applications. We are currently investigating novel (a) inflatable spherical rovers for Moon/Mars exploration and (b) antennas' array.
Sample publications (comple publications can be found at this link):
- Artusi, M, Potz, M, Aristizabal, J, Menon, C, Cocuzza, S, Debei S (2011) Electroactive elastomeric actuators for the implementation of a deformable spherical rover, ASME/IEEE Transactions on Mechatronics, Vol 16, No. 1, pp50-57.
- Potz, M, Artusi, M, Soleimani, M, Menon, C, Cocuzza, S, Debei, S (2010), Rolling dielectric elastomer actuator with bulged cylindrical shape, Smart materials and structures. Vol.19, No.12 (5pp)
- Soleimani, M., and Menon, C., (2010) Preliminary investigation of a balloon-shape actuator based on electroactive elastomers, Smart Materials and Structures, Vol. 19, 047001, (6pp)
- Carpi, F., Menon, C., De Rossi, D. (2009) Electroactive elastomeric actuator for all-polymer linear peristaltic pumps, ASME/IEEE Transactions on Mechatronics, Vol.15, No.3, pp.460-470.
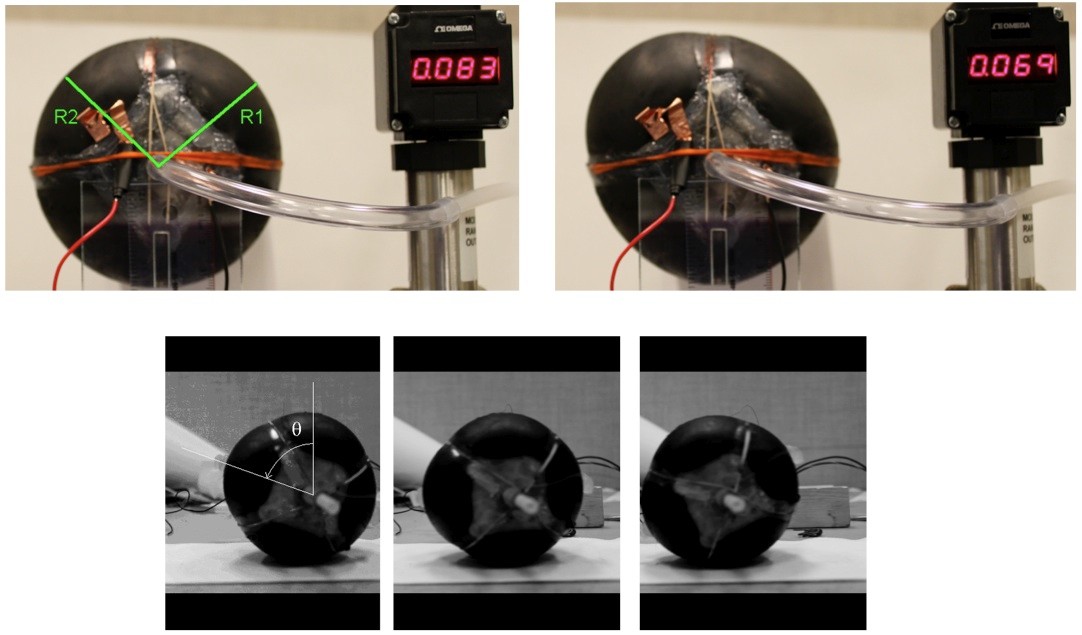
Some movies and images are presented below: