Climbing Robots
The MENRVA group is focusing on the design and development of different climbing systems to be used for both servicing operations on Earth and Space exploration.
Tank-style Robot
This robot is designed in the style of a tank with 2 parts, connected by a central joint. When climbing, the rear segment of the tank is responsible for preloading the front against the wall to ensure that it doesn't detach from the wall. Sensors provide the necessary information to detect impending detachment, and the control strategy acts to keep the robot attached to the wall. Along the treads of the tank are bio-inspired dry adhesives, also manufactured in the MENRVA lab.
Here is a video of our tank robot in action: "Scientists reach the heights with gecko-inspired robot"
Sample publications (complete list of publications can be found at this link):
Krahn, J, Liu, Y, Sadeghi A, and Menon, C (2011) A tailless timing belt climbing platform utilizing dry adhesives with mushroom caps, Smart Materials and Structures, Vol.20, No.11 (11pp)
Has generated a lot of press. Here are a couple of the 100+ news releases related to the robot he was working on:
- News 1130: "SFU researchers create robot based on a gecko"
- Vancouver Sun: "SFU creates robotic gecko that climbs walls"
- Discovery.com: "Gecko inspired robot rolls up walls"
- Engadget.com: "TBCP-II tank robot climbs walls with gecko inspired feet"
For a more complete list, see his profile on the DGS website:
http://www.sfu.ca/dean-gradstudies/blog/studentprofiles/JeffKrahn.html
Photo of the TBCP-II:

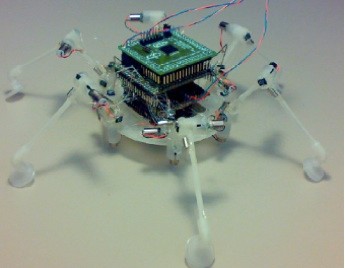
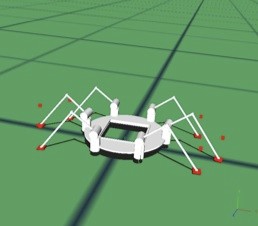
Spider-Inspired Robot
This spider inspired robot has legs with dry-adhesives on the feet. A preliminary version of the robot has been completed using off-the-shelf electronics, and currently work is towards a new version of the robot that will be used as a scientific testing platform to examine phenomona related to climbing with dry adhesives.
Recent Publication:
Li, Y, Ahmed, A, Sameoto, D, and Menon, C (2011) Abigaille II: towards the development of a spider-inspired climbing robot, Robotica. doi:10.1017/S0263574711000373 (link)
The movie below was published on the MIT Technology Review:
Photos of our spider-inspired climbing robot (Abigaille II) and a webots simulation of the same platform: